
 Download:
Download:
Figures of the Article
-
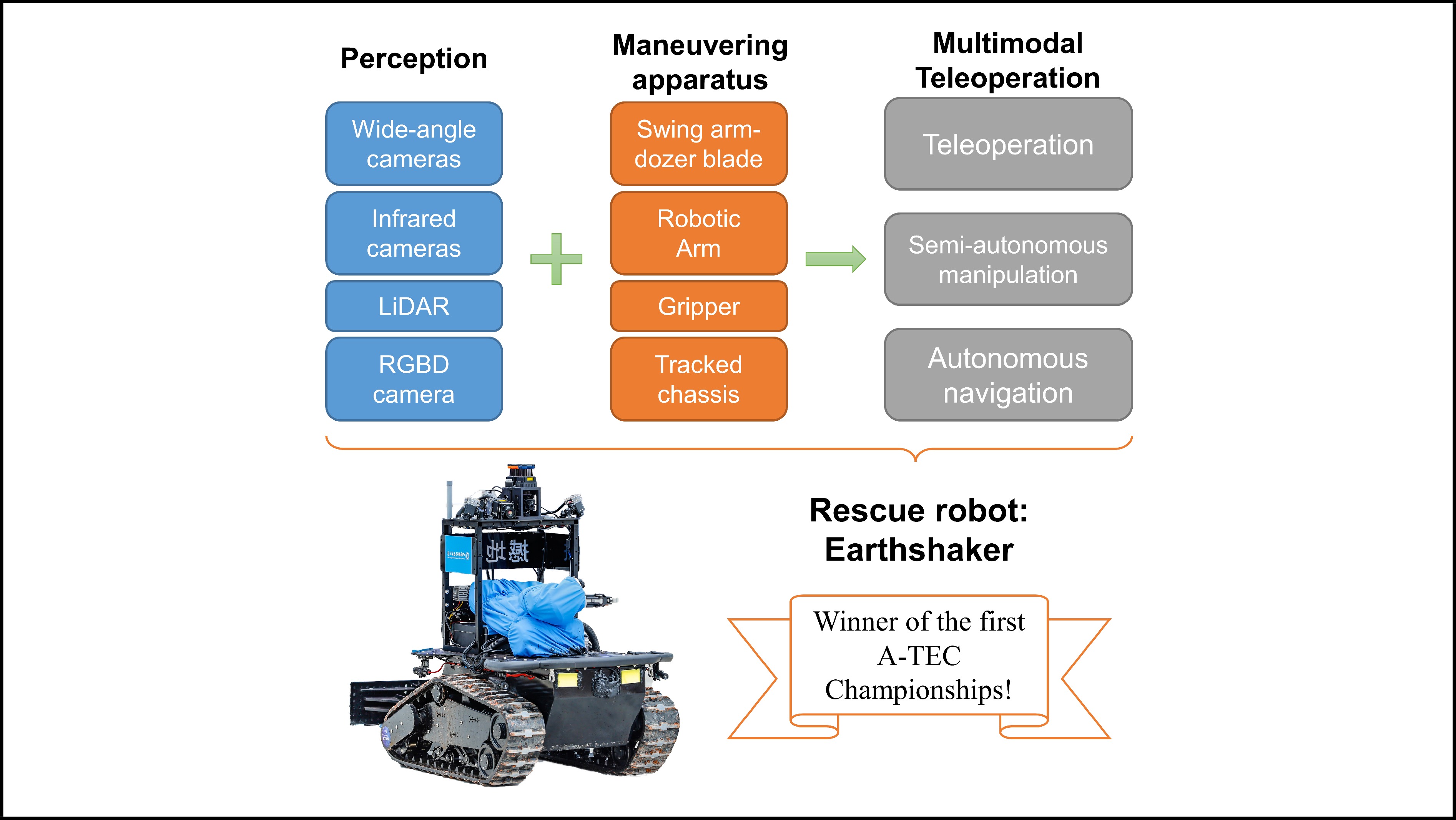
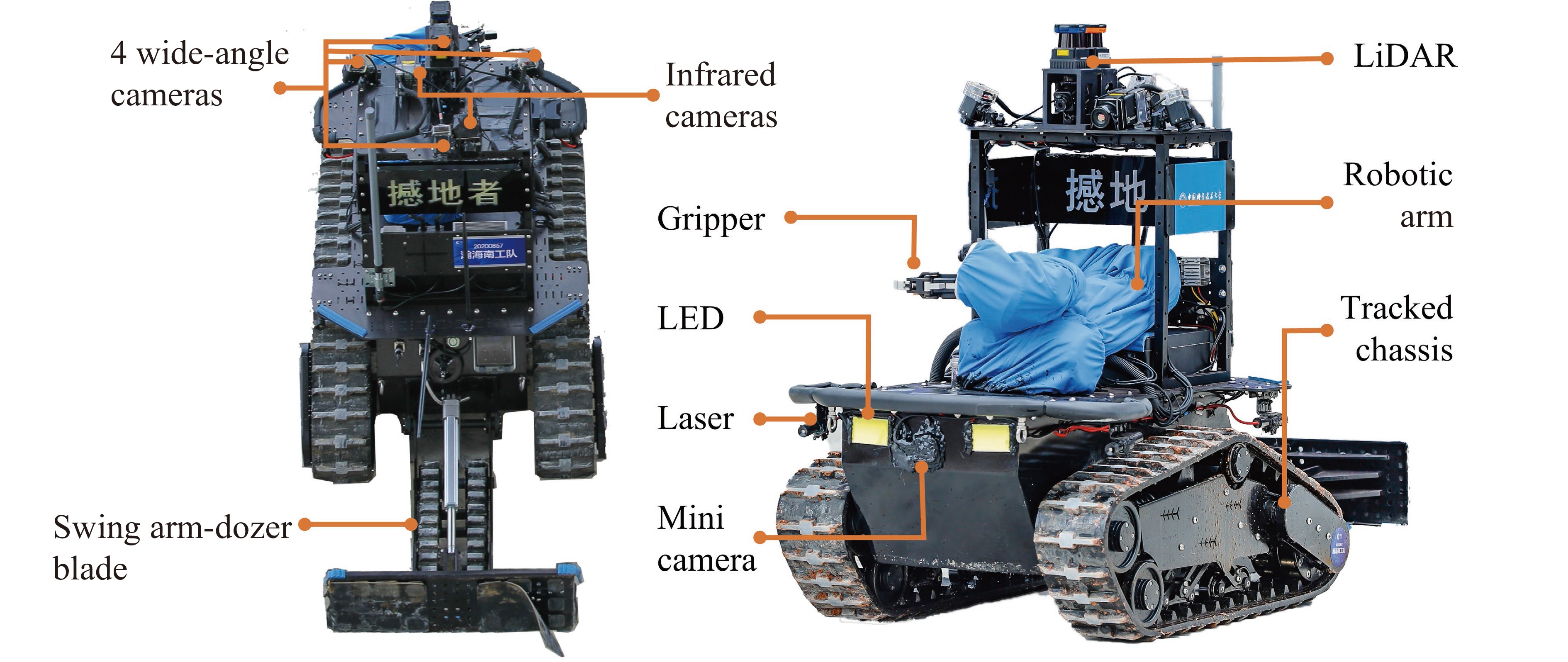
![]() Overview of the rescue robot Earthshaker.
Overview of the rescue robot Earthshaker.
-
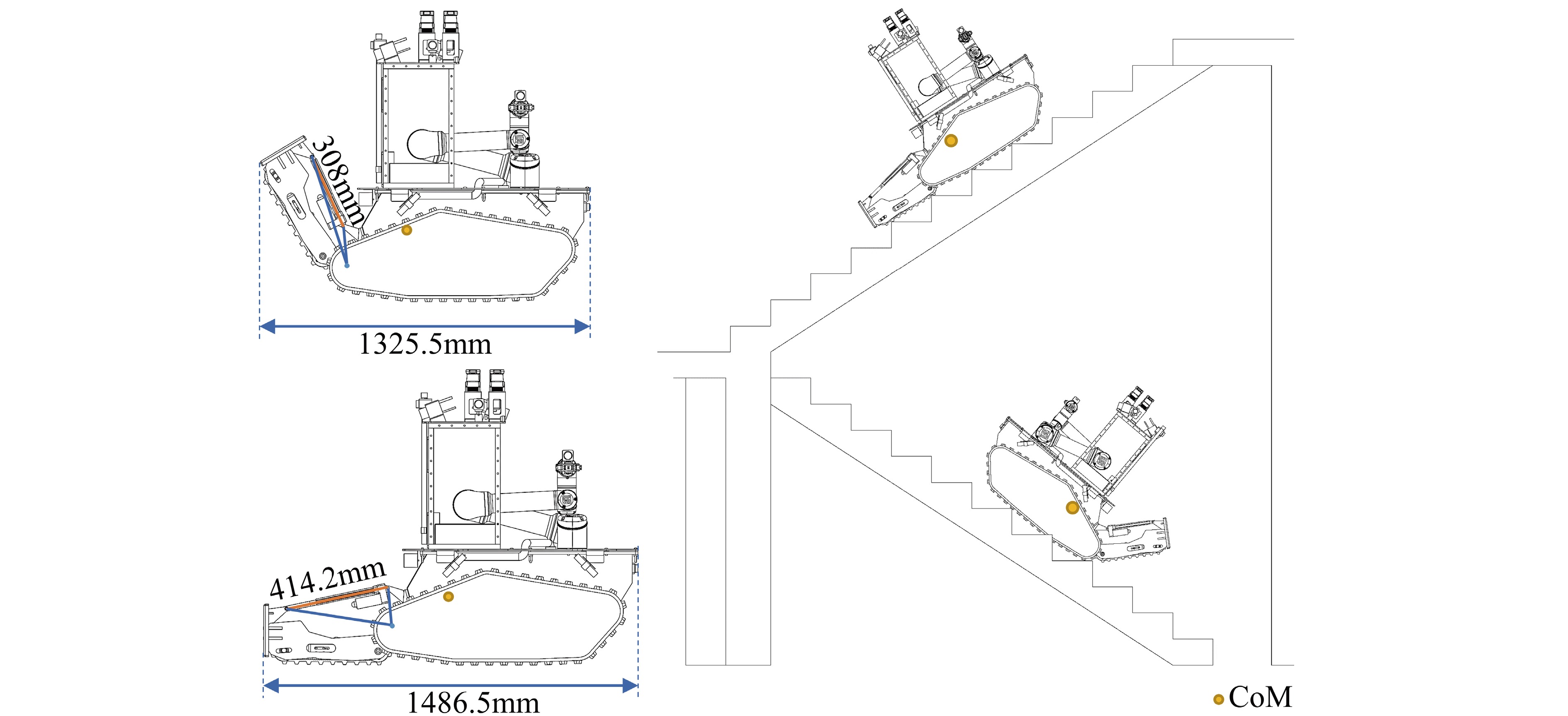
![]() Demonstration of the swing arm—dozer blade structure. The structure can be folded or extended based on needs.
Demonstration of the swing arm—dozer blade structure. The structure can be folded or extended based on needs.
-
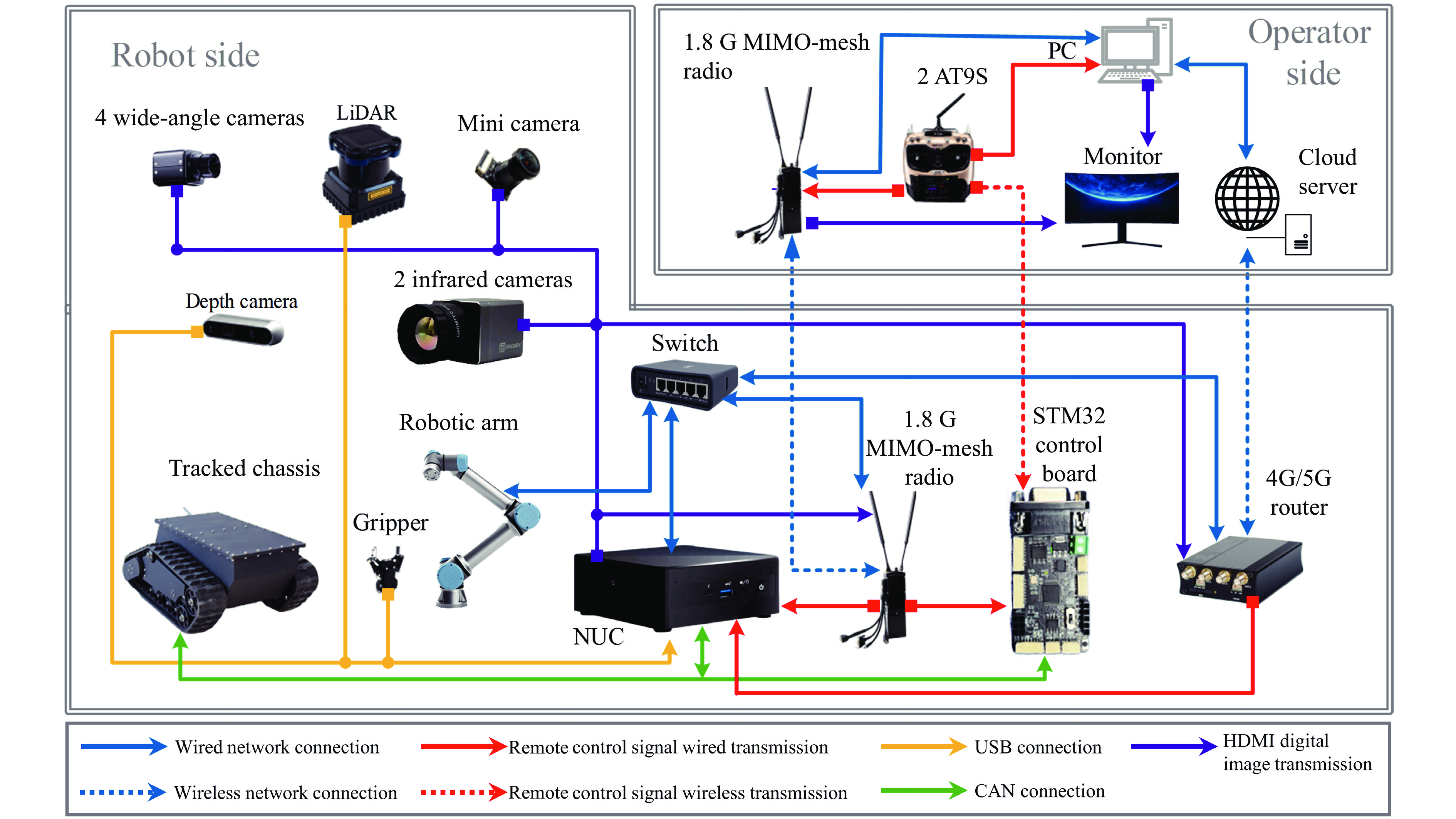
![]() Electrical schematics of Earthshaker.
Electrical schematics of Earthshaker.
-
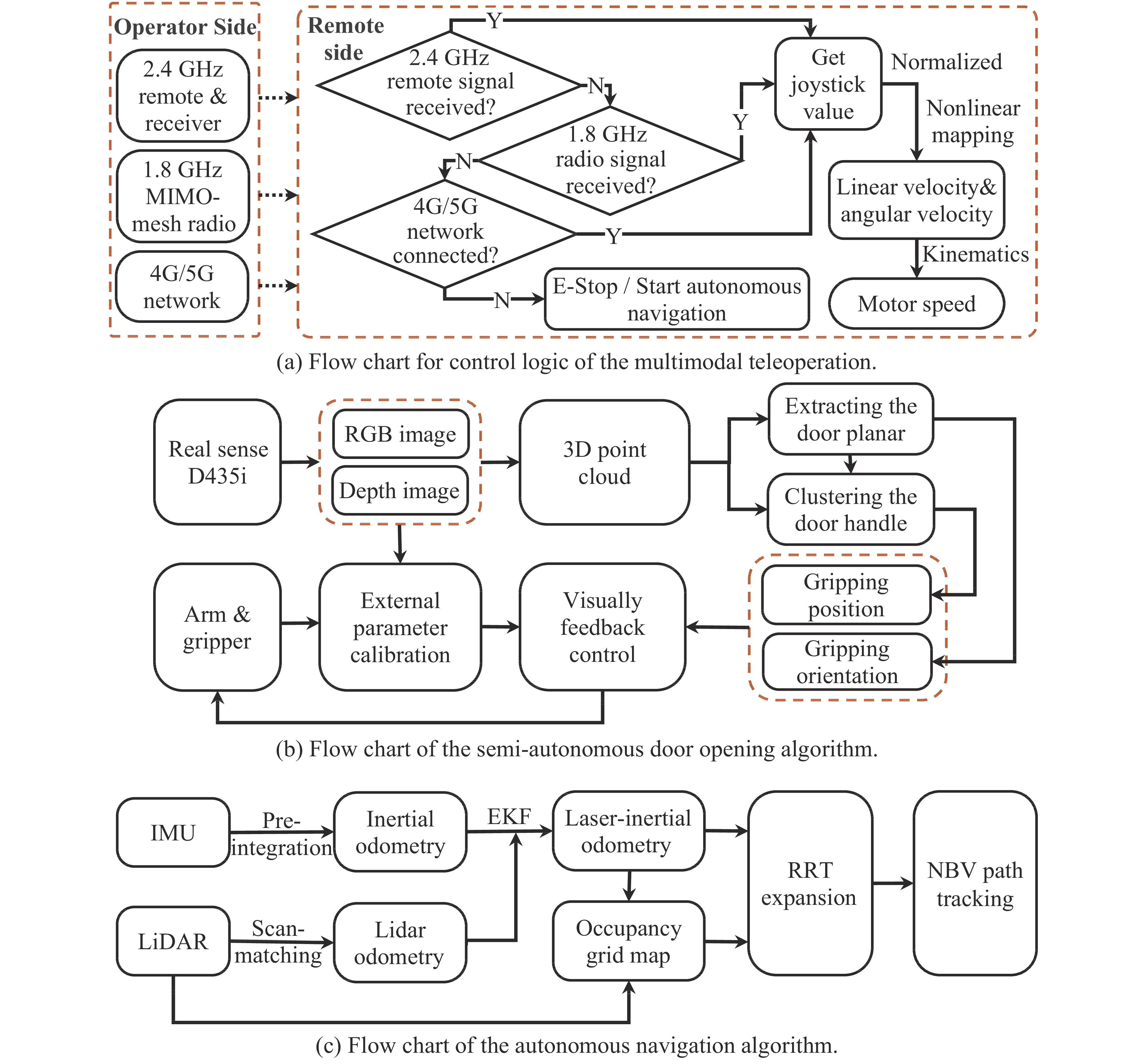
![]() Flow charts of the control algorithms for Earthshaker.
Flow charts of the control algorithms for Earthshaker.
-
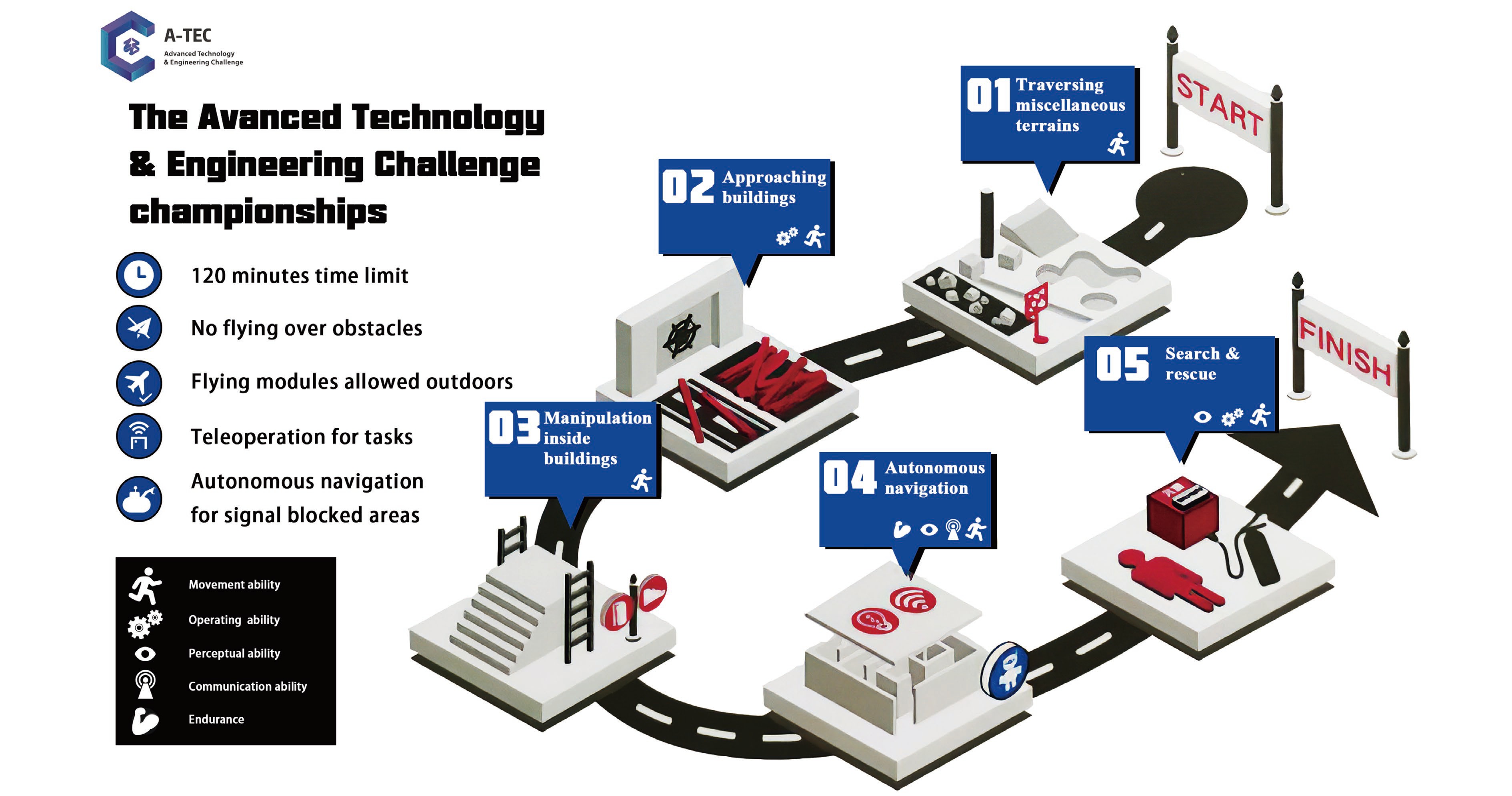
![]() Overview of the sessions of A-TEC championships.
Overview of the sessions of A-TEC championships.
-
![]() Snapshots of Earthshaker in Session 1. (a)–(c) Earthshaker was passing through a pool filled with water of 500 mm in depth. (d) Earthshaker was traversing muddy terrains. (e) Earthshaker was crossing a trench of 600 mm in width.
Snapshots of Earthshaker in Session 1. (a)–(c) Earthshaker was passing through a pool filled with water of 500 mm in depth. (d) Earthshaker was traversing muddy terrains. (e) Earthshaker was crossing a trench of 600 mm in width.
-
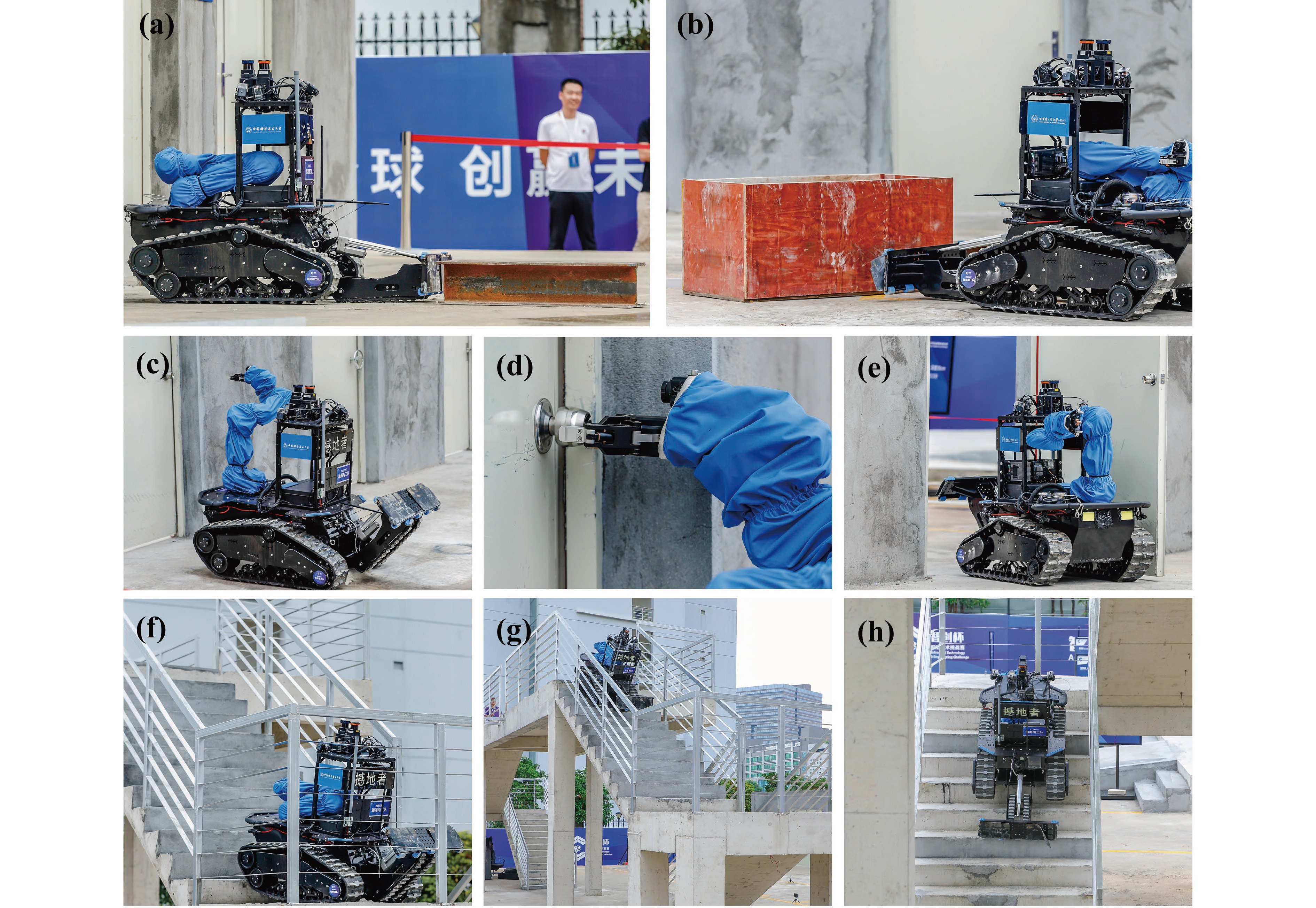
![]() Snapshots of Earthshaker in Session 2 & 3. (a)–(b) Earthshaker was clearing a light obstacle on the left and a heavy one on the right. (c)–(e) Earthshaker was opening a unifold door with a spherical door handle. (f)–(h) Earthshaker was climbing up and down the stairs.
Snapshots of Earthshaker in Session 2 & 3. (a)–(b) Earthshaker was clearing a light obstacle on the left and a heavy one on the right. (c)–(e) Earthshaker was opening a unifold door with a spherical door handle. (f)–(h) Earthshaker was climbing up and down the stairs.
-
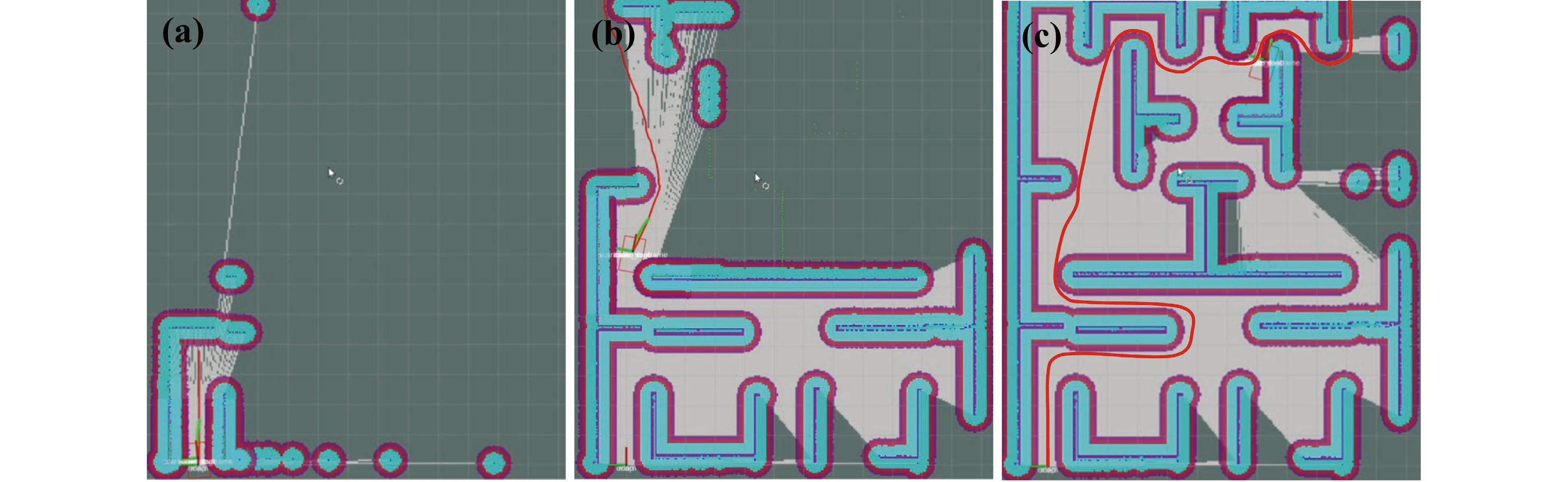
![]() The map built for the maze from the competition. The red slim line represents the path that the robot followed. The gray area indicates the accessible part of the map, while the cyan areas with dark red boundaries indicate the inaccessible parts. The three sub figures are the built maps, in turn, (a) at the beginning, (b) in the middle, and (c) at the end of the autonomous navigation through the maze.
The map built for the maze from the competition. The red slim line represents the path that the robot followed. The gray area indicates the accessible part of the map, while the cyan areas with dark red boundaries indicate the inaccessible parts. The three sub figures are the built maps, in turn, (a) at the beginning, (b) in the middle, and (c) at the end of the autonomous navigation through the maze.
-
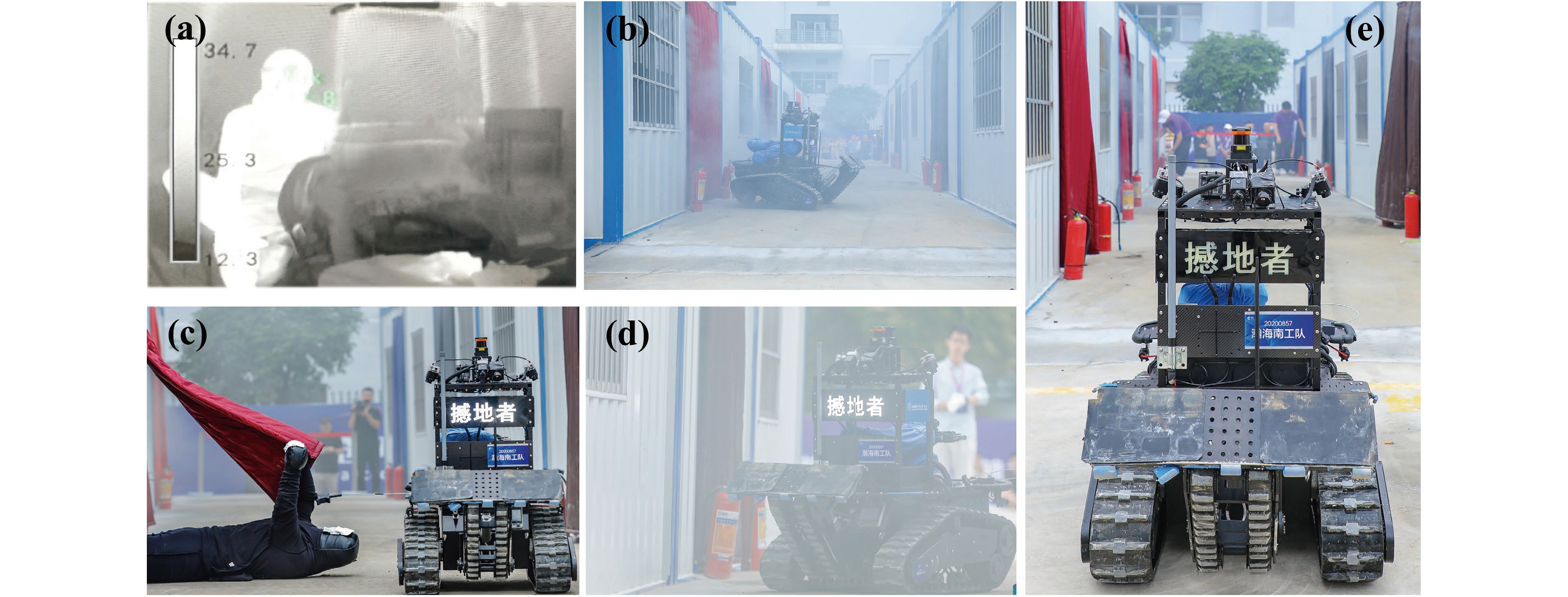
![]() Snapshots of Earthshaker in Session 5. (a) The infrared thermal image of the smoky environment. (b)–(e) The scene and the strategy used to rescue the dummy.
Snapshots of Earthshaker in Session 5. (a) The infrared thermal image of the smoky environment. (b)–(e) The scene and the strategy used to rescue the dummy.

Related articles
-
2021, 51(5): 360-368. DOI: 10.52396/JUST-2021-0063
-
2021, 51(2): 140-146. DOI: 10.52396/JUST-2020-0006
-
2021, 51(2): 111-116. DOI: 10.52396/JUST-2021-0029
-
2020, 50(4): 474-478. DOI: 10.3969/j.issn.0253-2778.2020.04.012
-
2018, 48(10): 801-809. DOI: 10.3969/j.issn.0253-2778.2018.10.006
-
2018, 48(10): 785-790. DOI: 10.3969/j.issn.0253-2778.2018.10.003
-
2016, 46(11): 887-891. DOI: 10.3969/j.issn.0253-2778.2016.11.002
-
2016, 46(1): 6-11. DOI: 10.3969/j.issn.0253-2778.2016.01.002
-
2010, 40(4): 346-352. DOI: 10.3969/j.issn.0253-2778.2010.04.003
-
2008, 38(8): 873-877.
